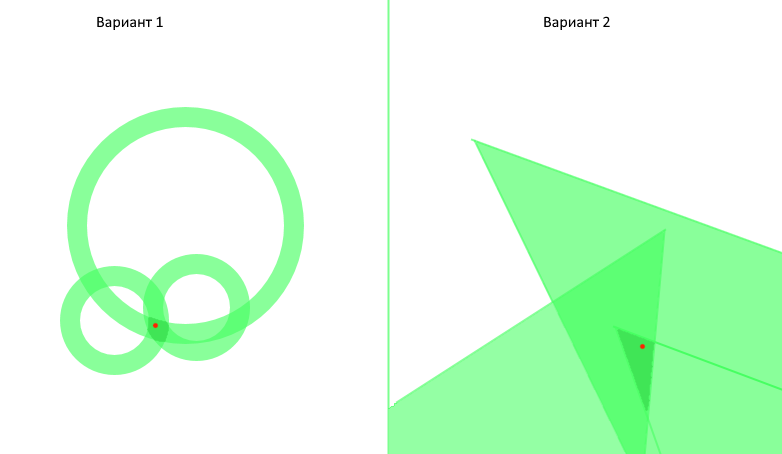
Итак смысл предложения в том что бы при сканировании мы не просто нажимали кнопку и ждали и шли по детектору, а должны были вначале по саку подойти достаточно близко к маечку. Тут сразу есть несколько вариантов как сак скажет нам как искать. Сложный вариант сак выводит дальность до маячка в метрах, но без направления с погрешностью и второй сак пишет азимут на маячок, но без дальности. Простой вариант тоже самое, но графически на экране сака. И так сканируя подходим всё ближе, а достать детектор можно будет только когда погрешность будет больше чем точность сака.
Не евовское сканирование конечно, но чем не вариант?